Variable Impedance Robotic Gripper
VIRG
This is capstone project for the class ME 494-495. The goal is to create a robotic gripper that increases stiffness when the gripping force increases, similar to a human's hand. The gripper would be able to grip light and delicate object with low stiffness, hence prevents shocks and impulse from transferring to the object; and grip heavy objects with high stiffness, preventing it from deflecting the gripper when moving at high speed. In addition, we aim to develop a passive and mechanical stiffness varying mechanism to increase robustness and reliability.
The variable stiffness is achived by using a non-linear stiffness device. In particular, we chose a piston.
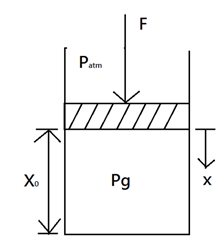
The stiffness of compressing is piston can be derived from the ideal gas law
Where \(A\) is the cross section area of the piston, \(X_0\) is the unloaded height of the piston.
Now rearrange the equation for F
The stiffness for a nonlinear element is defined as the derivative of the force with respected to the displacement.
We are interested in the relation of the stiffness and the force, with some substitution, we can find that
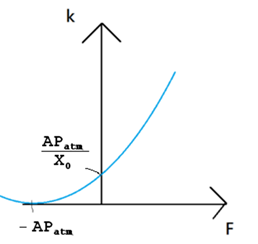
This shows that using a piston the stiffness increases quadratically with increasing force
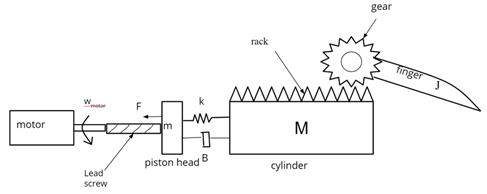
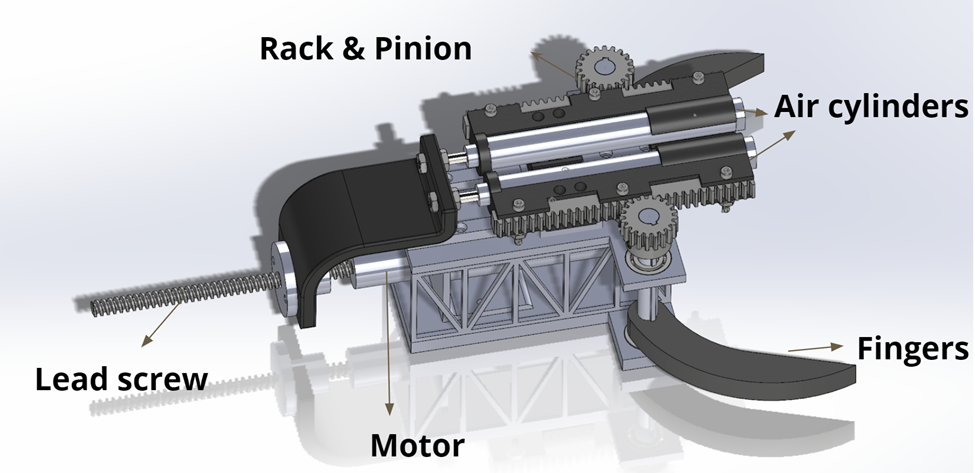
The griper is driven by a DC motor. The rotation motion is turned into translation motion by a lead screw. The lead screw pulls on the air cylinder. The other side of the air cylinder is connected to the finger via rack and pinion. When the finger is unloaded, this causes the finger to rotate. Once the finger is loaded, the body of the air cylinder cannot move and the motor starts compressing the air inside the cylinder, thus increases the stiffness.